
Contents
Releases
Version 2.36 released on 18/6/2020
- This release has only minor modifications to avoid introducing new features in the version which is flawlessly fine since three years.
- Removed support for LRSmax boards (no longer in production).
- Bug fix : allows to save the failsafe position for ULRS Mini boards
Version 2.35a rc released on 3/6/2017
- Bug fix : solved the issue if trying to change parameters on a module having a blank eeprom
Version 2.35 rc released on 1/6/2017
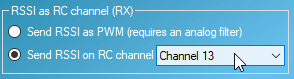
- RSSI output as RC channel
- Support for the new HK modules (TX only for the moment)
- Refresh the list of COM ports

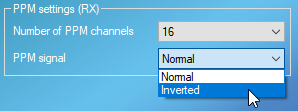
- Configurable number of PPM channels

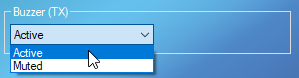
- Parameter to deactivate buzzer + correction of buzzer bug
- Inverted or normal PPM signal (ready)
Version 2.34a rc released on 24/2/2017
Version 2.34 rc released on 23/2/2017
- Remark : this version is released as a separate download.
- Support for LRSMAX RX 1W
- TX baudrate slightly closer to 57600 bauds (improved compatibility with OpenTX)
- Support for latest Mission Planner : the issue was a bug in Mission Planner that showed lost packets for no reason. This was discussed with MP developer which solved it. The issue is present in Mission planner 1.3.38 to 1.3.43 so please use only MP >= 1.3.44
- bugfix : Issue with 5 channels
- bugfix : Button for the 100mW TX was assigned to a wrong pin
- bugfix : TX channels flickering in ULRS CC
Version 2.33 beta released on 17/11/2016
- Baudrate changed to 57600 bauds for the TX, because this baudrate can be generated with precision by the atmega, and it avoids many issues encountered at 115200 depending on the FTDI cable used.
Version 2.32.e beta released on 5/11/2016
- Slight baudrate modification, for compatibility with all FTDI adapters. Should resolve many issues such as :
- issue to switch a module from TX to RX (because it happens at 115200 bauds, the reverse operation happens at 19200 which is fine)
- issue to save parameters
- glitches / flickering of the ULRS CC display, or no display at all
- users who were able to flash their OrangeRX, but not to use ULRS CC (because the flashing occurs at 57600 bauds)
- However there’s a specific case that still requires a good FTDI adapter : the Wolfbox modules are different from the other modules because they require a 115200 bauds speed for flashing. But avrdude doesn’t seem to accept unusual baud rates such as 117000 which would be required. So for Wolfbox modules flashing (and only for flashing, not for normal use), a good FTDI adapter is required.
- Added a small LED effect on the status screen : it blinks everytime an ULRS status packet is received : allows to see that it communicates even if there’s no other change on the status screen.
Version 2.32.d beta released on 21/10/2016
- This release modifies only the ULRS CC, not the firmware ⇒ no need to reflash the firmware).
- Introduces a short delay in the parameters saving procedure to avoid a bug (staying with status ‘saving’ forever).
Version 2.32.c beta released on 20/10/2016
- This release modifies only the ULRS CC, not the firmware ⇒ no need to reflash the firmware).
- Introduces the mavlink server feature : can forward the live mavlink data simultaneously to many GCS, on an unlimited number of smartphones, tablets or computer, via cable network, wifi, or over the internet
- Reactivates the spectrum analyzer
- Bugfix : some mavlink packets were not decoded correctly. This improves the module detection algorithm and parameters saving function.
Version 2.32.b beta released on 7/8/2016
- Bugfix :Ultimate LRS Mini spongeboards weren’t reading the PPM on A0 (A3 was fine).
Version 2.32 beta released on 7/8/2016
- Correction of an error message when changing parameters on a new board.
Version 2.31 beta released on 6/8/2016
- Allows ULRS CC to flash the firmware to Wolfbox modules. The firmware is exactly the same, but these modules have a bootloader that runs at 115200 bauds rather than 56700, so a small adaptation was required to ULRS CC.
- Option to have PPM input and output either on pin A3 or A0 for Ultimate LRS Mini boards. This was required because the ULRS Mini “Sponge board” has its PPM connected to pin A0 rather than A3. This doesn’t impact the OrangeRX modules.
- Ability to remap the RC channels.
- Solved an ULRS CC freezing issue.
Version 2.30 beta released on 19/7/2016
- Solves an issue with the Adafruit I2C to servo converter.
- ULRS CC windows height is reduced to support laptop screens 768 pixels high.
Version 2.29 beta released on 14/7/2016
- Increased the timeout for detection of ULRS modules at startup
- Code size reduction to allow uploading with bootloader
Version 2.28 beta released on 10/7/2016
- Bug fix for yesterday’s release (CRC calculation)
- Hide the ‘upload firmware’ and ‘change parameters’ buttons when not connected
Version 2.27 beta released on 9/7/2016
- Eeprom parameters protection : the parameters are now stored in eeprom with 7 redundant copies, CRC protected.
Version 2.26 released on 2/7/2016
- Just a bug fix for the PPM.
Version 2.25 released on 30/6/2016
- Notice that this is an alpha version, although it should work fine, not all features have been retested when all the code was put together. That will be some testing to do for the bold beta testers.
- In particular it was not deployed with the bootloader on an Arduino mini (a programmer was used). It should work with the bootloader, but as the Arduino mini bootloader is different from the Arduino uno, there may be an issue to program it.
- The I2C devices have been tested separately and not in the last compiled version.
- Didn’t recheck how it behaves if the eeprom is blank (new module), there could be random values that will be used as failsafe values.
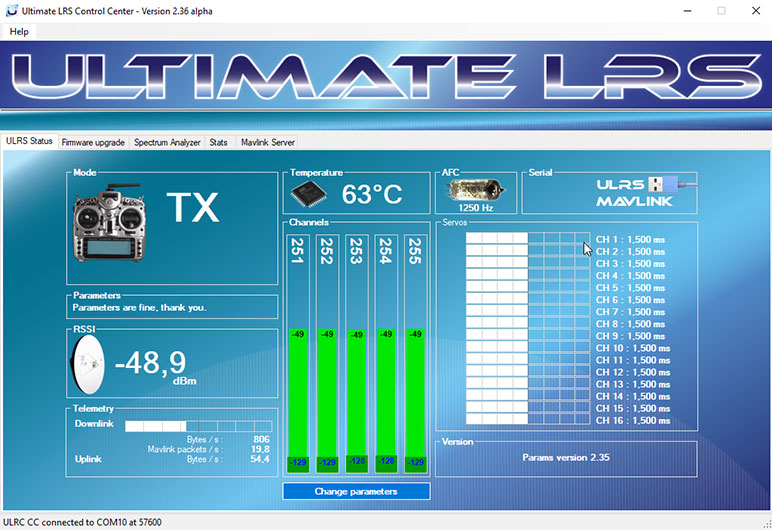
- When starting, ULRS CC will check the COM ports and try to determine which ones are connected to an ULRS module. It will only recognize modules with the latest version. During this process, if it finds an ULRS it will immediately display its status once (RSSI etc). Don’t forget to click ‘connect’ to have the status and statistics updating automatically.
- Support for Ultimate LRS Mini. The temperature of the module (shown on the status screen in ULRS CC) will be around 50-52°C, which is a normal.
- Support for 4 alphanumeric characters LED display. Displays the RSSI either as percentage, dBm or raw value depending on the channel 16 position (3-way switch). Doesn’t require any external component, just 4 wires for I2C.
- Improvements in the inner workings for better bandwidth usage. Adaptative packets size and rate.
- New indicators for the status screen, such as AFC. That stands for Automatic Frequency Control, it’s something that was implemented since the beginning in the ULRS firmware but wasn’t displayed in the status screen. In short, it’s a small frequency offset between the TX and the RX. It can be due to the crystal’s precision, or to temperature effects. It’s always relatively small in percentage or rather in parts per millions (a few hundreds Hertz in comparison to the frequency of 432 millions of Hertz), and should stay around the same value for a given pair of TX and RX.
- Parameters tabs removed, the channels list is shown graphically on the status screen, with the signal and noise level for every channel. Some statistics such as current telemetry bandwidth are also on the status screen rather than in the statistics tab.
- Extended servo values support : servo values from 0.5 to 2.5 ms are supported with full resolution. Normal servo values are between 1 ms and 2 ms.
- Separate popup for parameters modification : when the popup pops up, the current parameters are shown, and can be modified and saved (Apply / Cancel). When clicking on Apply, the popup will only close itself when the parameters are really saved, which means not only the command is sent, but the ULRS has answered with the correct bind code and channel list.
- Improved safety regarding the eeprom parameters. Notice that the RX shouldn’t be powered from 5V but directly from the battery (up to 30V) for maximum safety.
- Quick-start : the RX and TX are connected at startup without delay. The morse signal was removed, the modules simply triple-bip when starting.
- Support for I²C Adafruit 16 channels output.
- I2C devices can be plugged or unplugged during operation.
- Already developed but not included in this release :
- Tab to show user selected values (altitude, roll, voltage etc), like on an OSD. Allows to move and resize every indicator.
- Tab to show a real time graph of bandwidth used, packets size etc. Used for development purposes.
- Ability to forward the mavlink data to Mission Planner, so that ULRS CC and Mission Planner can run at the same time.
- Mavlink decoding
- Display on a 4×20 characters LCD
Remarks
- Refreshing the COM port list doesn’t work always (simply close and reopen the application).
- Some exceptions are not catched yet, for example removing the USB cable while programming could throw an exception. In the next version this type of exception will be catched properly.
- Adafruit I2C servos only receive data when the connection is established between RX and TX.
- When ULRS CC is connected it can create short failsafes/beeps when showing the status screen.
- Three types of mavlink messages are marked {NULL} in the stats tab. No impact but it seems that these messages are only generated by Pixhawk and aren’t in the official mavlink documentation.
- The new versions of ULRS CC are automatically downloaded and run when clicking on the desktop shortcut.

When was Version 2.36 of ULRS released, and what modifications were made in this release?
Regard Telkom University
See here the release history : http://www.itluxembourg.lu/site/ulrs-release-history/